|
[SPG] 모터에서 열이 많이 발생하는데요?
|
| 모터에 전류가 흐르면 전기적, 기계적 손실로 인하여 열이 발생하나, 모터를 허용최고온도 이상 오르지 않도록 제작하였습니다.
<출처 : SPG> |
|
[SPG] 모터를 운송 또는 사용장소의 온도가 -10º이하여도 괜찮을까요?
|
| 온도가 크게 변화하면 모터 내부에 이슬이 맺혀, 녹슬거나 모터 수명을 짧게 하며, 감속기와 모터의 베어링 기동이 저하될 수 있습니다.
<출처 : SPG> |
|
[SPG] INDUCTION, REVERSIBLE 모터의 회전수를 바꿀 수 있나요?
|
| INDUCTION, REVERSIBLE 모터를 포함한 단상(교류) 유도전동기는 전원주파수에 의해 회전수가 결정됩니다.
회전수를 변화시키는 용도에 SPEED CONTROL 모터를 사용하시면 편리합니다.
<출처 : SPG> |
|
[SPG] 콘덴서를 다른 제품으로 사용해도 되나요?
|
| 당사에서 모터와 함께 제공하는 콘덴서는 당사 제품에 적용한 콘덴서 중 가장 탁월한 성능의 제품을 선정했기 때문에,
같은 용량의 제품을 사용하시기 바랍니다. 단, 전해콘덴서는 사용하실 수 없습니다.
<출처 : SPG> |
|
[SPG] 콘덴서는 왜 사용되나요?
|
| 삼상모터는 처음부터 '위상이 어긋난 전원'이 공급되므로 콘덴서가 필요없습니다.
그러나 단상 모터를 회전시키기 위해서는 회전자계가 필요한데, 콘덴서는 이 회전자계를 만드는 위상이 어긋난 전원을 제공합니다.
<출처 : SPG> |
|
[SPG] REVERSIBLE 모터의 "30분 정격"이란 무엇을 뜻합니까?
|
| REVERSIBLE 모터는 짧은 시간에 정회전, 역회전의 순시 가역성을 좋게하기 위하여 기동 TORQUE를 크게 설계했습니다.
이로 인하여 손실입력이 크며 온도상승이 비교적 높기 때문에 온도상승 측면에서 연속운전 가능시간을 30분으로 정한 것을 뜻합니다.
<출처 : SPG> |
|
[SPG] GEAR HEAD 출력축의 회전방향이 모터와 같거나 다른 이유는 뭔가요?
|
| 기어헤드는 모터의 회전수를 1:3부터 1:200으로 감속을 하는데, 여러가지 기어를 조합하여 조립을 합니다.
따라서 감속비에 따라 기어회전 방향이 달라지게 됩니다. (회전방향은 카탈로그 참조 요망)
<출처 : SPG> |
|
[SPG] GEAR HEAD에 주유를 해야 합니까?
|
| 주유할 필요가 없습니다. 이유는 기어헤드 내부에 윤활에 필요한 GREASE를 미리 주입했기 때문입니다.
<출처 : SPG> |
|
[SPG] 기어헤드의 회전수를 더 줄이고 싶은데 어떻게 해야 되나요?
|
| 1:200 감속기와 모터 사이에 중간 감속기를 조합하셔서 감속효과를 최대로 하실 수가 있습니다.
이때 허용 TORQUE는 1:200 기어헤드를 사용한 경우와 같습니다.
<출처 : SPG> |
|
[알파모션] PCI bus Line Error 메세지가 뜹니다.
|
다음과 같은 증상이 나타날 시 해결방법 입니다.[Window8 이상]
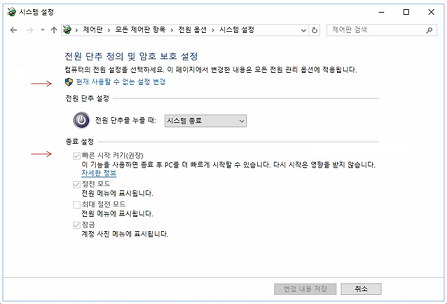
1.[시작]클릭 or [키보드 시작버튼] -> [설정] -> [시스템] -> [전원 및 절전] ->[추가전원설정] -> [전원 단추 작동설정] ->
[현재 사용할수 없는 설정 변경] -> [빠른 시작 켜기(OFF,체크해제)] 를 해주시면 해결이 됩니다. (아래그림참조)
위 사항으로도 해결이 안될시 당사로 연락바랍니다.
컴퓨터 업데이트시 자동설정이 될수도 있습니다.
☞절전모드도 비슷한 오류가 생길수 있으니 해제 해주세요.
 |