|
[민웰] LED 전원 공급장치를 선택하는데 있어 주의사항은 무엇인가요?
|
a. 조명기구 시스템이 직접 구동 모드에서 작동하는 경우 ▪ 연결된 LED 의 total V(f) 범위(상하한)는 전원 공급장치의 정전류 출력 범위 내에 있어야 하며, ex) LED 규격은 3.4~3.6V 이고, 6 개를 직렬 연결한 전압사용은 20.4~21.6V. 이때, 필요한 선택될 출력은 24V (정전류 구간 18~24V)의 모델입니다. ▪ PFC 와 역률이 0.9 이상인 전원 공급장치에서는 부하용량이 PFC 사양서에 명시된 용량보다 커야 합니다. PF(역률)와 출력부하와의 관계는 그림(1)이 보여주는것과 같습니다. 일반적으로 75% 이상의 부하가 필요합니다. ▪ 만약 출력전압이 불안정한 장소에서의 사용, 예를 들어 발전기설비 혹은 중공업 지역에서의 사용은 표 1 중의 “일반범용형"제품을 선택하여 주시기 바랍니다.
b. 조명기구 시스템이 정전류 IC 설계를 채용한 경우 ▪ 구동 IC 의 시동전압은 LED 전원 공급장치의 출력전압과 비슷해야 합니다. ▪ 구동 IC 의 전압안정도에 대한 요구조건은 비교적 높으며, 표 1 중의 “일반범용형"제품을 채용하실 것을 제안합니다. ▪ PFC 와 역률이 0.9 이상인 전원 공급장치에서는 부하용량이 PFC 사양서에 명시된 용량보다 커야 합니다. PF(역률)와 출력부하와의 관계는 그림(1)이 보여주는것과 같습니다. 일반적으로 75% 이상의 부하가 필요합니다. ▪ 구동 IC 사용은 EMI 결합문제를 불러일으킬 수 있습니다. 조명기구의 설계 완성 후, EMI 점검이 필요합니다. 만약 EMI 문제가 있다면 LED 전원 공급장치 사용문제(11)을 참고하실 수 있습니다.
<출처:(주)에버넷전자> |
|
[민웰] "Power Good"과 "Power Fail" 신호란 무엇이며, 어떻게 운용되나요?
|
일부 SMPS 는 기기가 켜고 꺼질 때, “Power Good”과 “Power Fail” 신호를 송출해 모니터링 제어용으로 하고 있습니다. Power Good : 정격전압이 90%에 도달한 이후, 10~500ms 이내에 TTL 신호(약 5V)를 송출한다. Power Fail : 정격전압이 90% 이하로 되기 전에, 최소 1ms 이전에 power-good 신호는 꺼지게 된다. 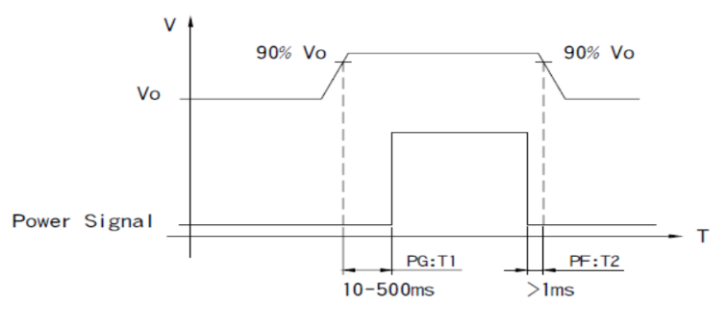
<출처: (주)에버넷전자>
|
|
[민웰] 최소 부하 요구사항이란 무엇이며, 제품사양서에서 그 정보를 어떻게 얻을 수 있나요?
|
민웰의 다출력 전원 공급장치(예를들어 2 채널 출력과 같은 다출력 전원 공급장치)는 최소의 부하조건이 있습니다. 그러므로 사용전에 제품사양서를 상세히 읽어보실 것을 권장합니다. 다출력 전원 공급장치가 제대로 작동하기 위해서 각 채널의 출력에는 필요 최소 전류가 있으며, 그렇지 않을 경우 전압이 불안정해지거나 정해진 전압 오차 범위를 벗어날 수 있습니다. 이 최소 부하조건사항은 사양서의 “전류범위”에서 참조할 수 있으며, 아래 표에 표시된 바와 같이 CH1 은 최소 필요한 전류 소모가 2A, CH2 는 0.5A, CH3 은 0.1A, CH4 는 최소 0A 가 필요합니다. 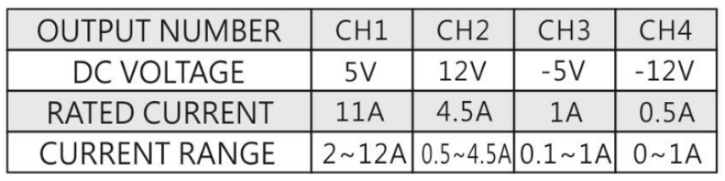
<출처: (주)에버넷전자>
|
|
[민웰] 민웰 전원 공급장치 카달로그의 입력에 AC 입력과 DC 입력이 있는데 그 차이는 무엇입니까?
|
a. 85~264VAC;120~370VDC b. 176~264VAC;250~370VDC c. 85~132VAC/176~264VAC by Switch; 250~370VDC • 상품 사양서에 a, b 항의 입력전원범위가 기재되어 있을 경우, 교류전류나 직류전류에 관계 없이 전원 공급장치가 정상 작동합니다. 그러나 일부 모델은 설계상 양극(+)이 AC/L 에 연결되고, 음극이 AC/N 전원 공급장치에 연결되어야만 작동하기에 주의하시기 바랍니다. 일부 모델의 경우 반대의 경우로, 양극이 AC/N 에 연결되고, 음극이 AC/L 에 연결되어야만 전원을 켤 수 있으며 만약 배선이 잘못된 경우에는 단지 전원을 켤 수 없을 뿐, 다시 반대로 연결해 놓으면 정상 작동하며 전원 공급장치에 다른 문제는 없을 것입니다. • 상품 사양서에 c 항이 기재되어 있을 경우, 반드시 115/230V 스위치 전환을 정확하게 해야만 230V 에서 250~370V DC 로 입력이 가능합니다. 만약 스위치 전환이 “115V”에서 250~370V DC 로 보내질 경우 전원 공급장치가 손상될 수 있으므로 반드시 주의해야 합니다. <출처: (주)에버넷전자> |
|
[민웰] 돌입전류(Inrush Current)란 무엇인가요? 어떤 부분에 주의가 필요한가요?
|
스위치 모드 전원 공급장치는 전원을 켰을 때에 매우 짧은 시간에 (1/2~1 전원주기, 예를들어 60Hz 전원 1/120~1/60 초) 매우 큰 펄스의 전류가 흐르게 됩니다. (제품설계에 따라 약 20~100A) 이후 정상모드로 돌아가게 됩니다.
이러한“돌입전류”는 파워를 켤때마다 나타나는 사항으로, 전원 공급장치에는 손상되지는 않지만, 전원 공급장치를 반복적으로 매우 빠르게 끄기/켜기는 권장하지 않습니다.
다른 한가지 주의사항은 여러 대의 전원 공급장치가 동시에 켜지는 경우, 대량의 돌입전류로 인하여 배전시스템의 보호 스위치가 동작 할 수 있습니다. 여러 대의 전원 공급장치는 시간 간격을 두고 하나씩 켜거나, 전원 공급장치에 리모트 기능을 사용하여 제품을 켜고 끄실 것을 제안합니다.
<출처 : (주)에버넷전자> |
|
[민웰] 민웰 전원 공급장치 출력단의 음극표시 -V와 COM의 차이는 무엇입니까?
|
COM(COMMON)은 민웰제품의 출력 속성에 따라 표기합니다. 아래 설명을 참조하여 주세요. 싱글 Output : 양극( +V ), 음극( -V ) 멀티 Output(공통접지) : 양극( +V1, +V2. ), 음극( COM ) <출처: (주)에버넷전자> |
|
[FASTECH] 스텝 모터 드라이버에 대한 노이즈 대책
|
노이즈 발생 영역에 따른 3가지 노이즈 방지 대책이 있습니다.
1. 모터와 드라이브간의 노이즈 방지 대책
2. 드라이버와 펄스 출력 상위 제어기 사이의 방지 대책
3. 드라이브와 전원 사이의 노이즈 방지대책
1. 모터와 드라이브 간의 노이즈 방지 대책
1) 모터와 드라이브 간에 페라이트 코어를 사용해 주시기 바랍니다.
2) 페라이트 코어는 일반 시중에서 각 케이블 두께에 맞게 사이즈별로 구매 하실 수 있으며
탈착식이기 때문에 쉽게 장착 및 분리 하실 수 있습니다. (배선 후 노이즈 염려 부분에 장착하시면 됩니다.)
3) 장착 방법은 아래 그림과 같습니다.

2. 드라이브와 펄스 출력 상위 제어기 사이의 방지 대책
1) 신호선을 최대한 짧게 배선하십시오
2) 신호선과 전원선의 간격은 최대한 멀리 배선하십시오
3) 신호선을 Twist Pair 선으로 사용하십시오.
: 종래 FLAT 케이블 대비 노이즈 절감에 유리하며, 케이블에 가해진 스트레스를 세트 꼬임부에서 흡수하여 가동성이
유리합니다.

TwistPair 선은 반드시 동일 신호와 짝(CW+와CW-, CCW+와 CCW- 등)을 이루어 사용해야 하며, 짝을 이루어 사용하지 않을 경우 역효과가 있으니 주의하시기 바랍니다. 그리고 Shield 선을 사용하고, Shield의 한쪽 또는 양쪽을 접지합니다. 단, 상위 제어부와 드라이브의 Frame 전위가 달라 사고의 위험이 있는 경우 한쪽만 접지하여야 합니다.

<일반 TwistPair 선> <Shield가 있는 TwistPair 선>
* 파스텍 권장사양
3. 드라이브와 펄스 출력 상위 제어기 사이의 방지 대책
1) 노이즈 필터 또는 Capacitor 를 사용하십시오.
: 노이즈 필터는 모터 구동시 발생되는 노이즈가 제어 회로로 들어가서 제어에 영향을 미칠 수 있기 때문에
이를 방지하고자 장착하게 됩니다.
2) Earth를 확실히 잡아 주십시오.
: 일반적으로 배선 도면에 “E”라고 표시가 되어 있습니다. “E” 즉, Earth 땅에 접지 하라는 이야기입니다.
안전을 위해서 표시되어 있는 부분에는 땅에 확실히 접지 될 수 있도록 배선 하시기 바랍니다.

<출처:fastech>
|
|
[FASTECH] Ezi-SERVO 와 S-SERVO 의 차이점
|
Ezi-Servo 와 S-Servo의 차이를 표로 정리하였습니다.
Ezi-Servo는 24V 입력 전압을 내부의 승압회로를 통해 모터에 40V로 인가하여 고속에서 발생하는 역기전력에 대비하고 있습니다. 이에 비하여 보급형 제품인 S-Servo 는 승압회로가 없기 때문에 고속 성능은 Ezi-Servo 보다는 떨어지게 됩니다.
그렇지만 실제로 사용하는 중저속 구간에서는 크게 무리없이 사용할 수 있습니다.
두 제품의 차이점은 아래의 표에서 자세히 정리하였습니다.
기타 문의 사항은 02-6396-4316 / solu@abtech.co.kr 로 문의 주시기 바랍니다.
|
|
[FASTECH] 드라이버 입력방식 문의 / 1펄스(Pulse 혹은 Step, Dir) 방식과, 2펄스(CW, CCW) 방식의 차이점
|
사용자 측에서 사용하는 모션 제어기로부터 위치 지령 펄스를 받아들이는 입력으로써 이동 량, 속도, 회전방향을 결정할 수 있습니다. 1. 1펄스 입력 방식 (PULSE/DIR) 펄스신호 입력 부(PULSE)에 펄스는 입력되고, 그 때 회전방향 입력 부(DIR)가 High Level 상태일 경우 모터는 정회전, Low Level 상태일 경우 모터는 역회전을 합니다. 
2. 펄스 입력 방식(CW/CCW)
CW 입력 부(CW)에 펄스가 입력되면 모터는 정회전, CCW 입력 부(CCW)에 펄스가 입력되면 모터는 역회전 합니다.  |
|
[FASTECH] 스텝 모터 드라이버에 대한 노이즈 대책
|
노이즈 발생 영역에 따른 3가지 노이즈 방지 대책이 있습니다.
1. 모터와 드라이브간의 노이즈 방지 대책
2. 드라이버와 펄스 출력 상위 제어기 사이의 방지 대책
3. 드라이브와 전원 사이의 노이즈 방지대책
1. 모터와 드라이브 간의 노이즈 방지 대책
1) 모터와 드라이브 간에 페라이트 코어를 사용해 주시기 바랍니다.
2) 페라이트 코어는 일반 시중에서 각 케이블 두께에 맞게 사이즈별로 구매 하실 수 있으며
탈착식이기 때문에 쉽게 장착 및 분리 하실 수 있습니다. (배선 후 노이즈 염려 부분에 장착하시면 됩니다.)
3) 장착 방법은 아래 그림과 같습니다.
2. 드라이브와 펄스 출력 상위 제어기 사이의 방지 대책
1) 신호선을 최대한 짧게 배선하십시오
2) 신호선과 전원선의 간격은 최대한 멀리 배선하십시오
3) 신호선을 Twist Pair 선으로 사용하십시오.
: 종래 FLAT 케이블 대비 노이즈 절감에 유리하며, 케이블에 가해진 스트레스를 세트 꼬임부에서 흡수하여 가동성이
유리합니다.
TwistPair 선은 반드시 동일 신호와 짝(CW+와CW-, CCW+와 CCW- 등)을 이루어 사용해야 하며, 짝을 이루어 사용하지 않을 경우 역효과가 있으니 주의하시기 바랍니다. 그리고 Shield 선을 사용하고, Shield의 한쪽 또는 양쪽을 접지합니다. 단, 상위 제어부와 드라이브의 Frame 전위가 달라 사고의 위험이 있는 경우 한쪽만 접지하여야 합니다.
<일반 TwistPair 선> <Shield가 있는 TwistPair 선>
* 파스텍 권장사양
3. 드라이브와 펄스 출력 상위 제어기 사이의 방지 대책
1) 노이즈 필터 또는 Capacitor 를 사용하십시오.
: 노이즈 필터는 모터 구동시 발생되는 노이즈가 제어 회로로 들어가서 제어에 영향을 미칠 수 있기 때문에
이를 방지하고자 장착하게 됩니다.
2) Earth를 확실히 잡아 주십시오.
: 일반적으로 배선 도면에 “E”라고 표시가 되어 있습니다. “E” 즉, Earth 땅에 접지 하라는 이야기입니다.
안전을 위해서 표시되어 있는 부분에는 땅에 확실히 접지 될 수 있도록 배선 하시기 바랍니다.
<출처:fastech>

|