|
[파스텍] 17. 드라이브에서 1펄스 입력 방식 및 2펄스 입력 방식은 무엇입니까?
|
사용자 측에서 사용하는 모션 제어기로부터 위치 지령 펄스를 받아들이는 입력으로써 이동 량, 속도, 회전방향을 결정할 수 있습니다. 1. 1펄스 입력 방식 (PULSE/DIR) 펄스신호 입력 부(PULSE)에 펄스는 입력되고, 그 때 회전방향 입력 부(DIR)가 High Level 상태일 경우 모터는 정회전, Low Level 상태일 경우 모터는 역회전을 합니다.

2. 펄스 입력 방식(CW/CCW)
CW 입력 부(CW)에 펄스가 입력되면 모터는 정회전, CCW 입력 부(CCW)에 펄스가 입력되면 모터는 역회전 합니다.

<출처 : Fastech> |
|
[파스텍] 16. 파스텍 제품의 속도 단위는 무엇인가요?
|
파스텍 제품 카달로그에서 명기하는 회전 속도의 단위는 RPM 즉, Revolution per Minute, 분당 회전 수로 명기하며, 일반적으로 Hz와 PPS (Pulse Per Second) 역시 사용하고 있습니다.

<출처 : Fastech> |
|
[파스텍] 15. 케이블 사용시 권장 길이는 얼마입니까?
|
케이블 사용 권장길이는 아래 표와 같습니다.
추가로 연장이 가능하지만 Noise 특성 문제 등이 발생 할 수 있으니, 권장 사양 기준으로 사용을 해 주시기 바랍니다.

일반적으로 파스텍에서 판매하는 중계 연장 케이블들의 경우
1. 모터 연장 케이블 : 18AWG, 22AWG 또는 24AWG
2. I/O 연장 케이블 : 28AWG
3. 엔코더 연장 케이블 : 26AWG
4. 전원 연장 케이블 : 18AWG, 22AWG 를 적용하고 있습니다.

<출처 : Fastech>
|
|
[파스텍] 14. Ezi-SERVO의 과열 Alarm 발생 조건은 무엇이며 그 해결 방안은 무엇입니까?
|
1. 발생조건 - 드라이브의 과열 Alarm의 경우 모든 Ezi-SERVO 및 S-SERVOII 시리즈는 드라이브의 내부 온도가 85℃ 이상일 경우, 공히 [과열 이상] 5번 Alarm이 발생하게 됩니다.
2. 해결방안 - 여러 대의 제품을 하나의 밀폐 공간에 설치할 때는, 냉각 팬 등을 설치하시어 드라이브의 주위 온도가 가능한 50℃ 이하로 되도록 설치 및 사용해 주시기 바랍니다.


<출처 : Fastech> |
|
[파스텍] 13. Ezi-SERVO Brake 타입 제품 사용 시 브레이크 Delay 설정 조건 및 배선은 어떻게 해야 합니까?
|
1. 설정조건 : 10ms ~ 5,000ms (출하값 400ms)
2. 배선 (아래 배선표 참조)
1. 브레이크 Delay 설정 조건
Ezi-SERVO 시리즈의 경우 먼저 Ezi-SERVO Plus-E 제품은 최소 10ms ~ 5,000ms 까지 Delay Time 설정이 가능하며, 출하 값은 400ms 입니다.
출하 값으로 설정 시 상하 구동의 경우 부하에 따라 축에 연결된 부하물의 낙하 가능성이 있어 설정 값 변경작업을 요청 드립니다. (Ezi-SERVO ST 의 경우는 고객 측에서 Delay Time 설정이 불가능하며 공장 출하 값으로 사용하셔야 합니다.)
Ezi-SERVO외 S-SERVOII 나 Ezi-STEP등 Brake를 장착하여 사용하는 각 제품별로 출하 값에 약간의 상이함이 있으니, 반드시 제품 사용 전 해당 제품 매뉴얼을 참조해 주시기 바랍니다.

Ezi-SERVO ST 및 Plus-E 계열 Brake 타입의 브레이크 배선은 다음과 같습니다.

Ezi-SERVO ST 및 Plus-E 계열(모터 사이즈 86mm) Brake 타입의 브레이크 배선은 다음과 같습니다.


< 추가 설명 >
전자 브레이크에는 무여자 작동형과 여자 작동형 브레이크 두 가지가 있습니다.
[무여자 작동형] 브레이크의 경우에는 브레이크부의 전원을 OFF 했을 경우 BRAKE가 작동을 시작하고 SHAFT를 유지하여 정전 시의 안전 BRAKE로 볼 수 있습니다.
[여자 작동형] 브레이크의 경우에는 모터 정지와 동시에 브레이크부를 ON 하면 BRAKE가작동하여 SHAFT를 유지하며, 무여자 작동형에 비해서는 큰 유지력을 갖습니다.

파스텍의 Ezi-SERVO는 무여자 구동 방식의 전자기 브레이크를 채용하고 있습니다.
브레이크에 전원이 공급 되어야 제동력이 발생 되고, 전원이 끊어지면 제동력을 상실하는 여자 방식 브레이크와 달리, Ezi-SERVO에 채용되는 브레이크는 전원이 끊어지면 브레이크 내부 스프링의 압착력에 의해 제동력이 발생되며, 비상 전원 차단 시에도 브레이크가 기계적으로 제동력을 발휘하여 회전을 완전히 방지 함으로서, 상하 구동의 경우에도 급작스런 낙하를 방지하여 상황에 유연하게 대응 할 수 있습니다.
<출처 : Fastech>
|
|
[파스텍] 12. Ezi-SERVO의 In-Position 기능은 무엇입니까?
|
In-Position 기능은 위치결정 완료 신호 입니다.
Ezi-SERVO 시리즈의 위치 결정 완료 범위는 In-Position 값 설정으로 결정 됩니다. Ezi-SERVO 드라이브상의 총 3개의 로터리 설정 스위치 중 우측 SW4 즉, In-Position값 설정 스위치를 통해 고객이 직접 설정을 하실 수 있습니다. 위치 결정 완료 신호의 출력 조건인 In -Position 값 설정은 위치 지령 펄스의 종료 이후, 해당 목표 위치로부터 발생하는 위치 편차가 미리 설정한 In-Position 값보다 적은 경우 즉, 설정 값에서 Error 발생 없이 정확하게 목표 위치에 도달한 경우 출력되는 것을 위치 결정 완료 신호라고 합니다.

Ezi-SERVO의 In-Position 신호는 SERVO ON 상태에서 모터가 목표 위치에 정확히 도달하게 되면 출력되는 신호를 말하는 것으로( LOW 레벨 : 포토 커플러 ON), 파스텍 제품은 이 신호의 출력 조건을 아래 표와 같이 고객이 필요로 하는 상황에 맞게 최적으로 설정할 수 있도록 되어 있으며, 다른 일반 Closed Loop 제품들에 비해 In-Position 값의 설정 범위가 최대 ±7 pulse 이기 때문에 정밀도 측면에서는 가장 우수한 제품입니다. Ezi-SERVO의 엔코더 분해능은 10,000ppr을 기본으로 20,000 및 32,000까지 설정이 가능하므로 ±7 pulse로 설정을 하시더라도 최대 ±0.252° 에서 최소 ±0.078°까지 초 정밀 제어가 가능합니다.
 
<출처 : Fastech>
|
|
[파스텍] 11. 위치 오차 초과 Alarm 발생 조건은 무엇이며 그 해결 방안은 무엇입니까?
|
발생조건 : 모터 정지 상태에서 90° 이상의 위치 오차가 발생한 경우 해결방안 : 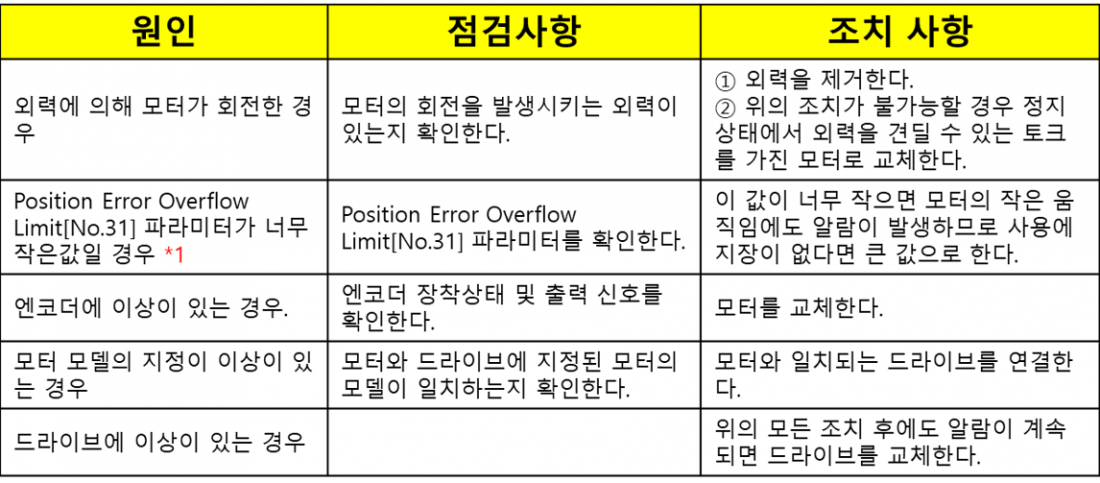 *1. 적용모델: Ezi-SERVO-PR / Ezi-SERVOII-PE/ Ezi-SERVOII CC-Link
<출처 : Fastech>
|
|
[파스텍] 10. 24V Open Collector 출력의 PLC 위치 카드를 사용 중입니다. Drive와 결선 시 주의 사항은 무엇인가요?
|
|
24V Open Collector 펄스 입력 시는 외부 저항을 추가해 주셔야 합니다.
(파스텍 Step Drive 는 펄스 입력 시 5V Line Drive 입력 기준으로 출하됩니다.)
1. 입력 신호 및 드라이브 배선도 : 예) Ezi-SERVO ST

2. 외부 저항 추가 검토 
외부 저항 용량의 적정 범위 :
1) 12V의 경우 Rx=680ohm용으로 680ohm~1.2kohm 사용가능
2) 24V의 경우 Rx=1.8kohm용으로 1.8kohm~2.2kohm사용가능 ※ 위와 같이 5V 이상 입력하시는 경우, 반드시 저항을 추가하여 사용 하십시오.
그렇지 않을 경우, 드라이브 내부 회로가 파손 됩니다.
<출처 : Fastech>
|
|
[파스텍] 09. 서보 시스템을 쓰다가 이번에 귀사 제품을 사용해 보려고 합니다. 그런데 스텝 모터는 발열이 심해서 좀 걱정이 되는데, 파스텍 제품의 모터 온도 특성은 어떠한가요?
|
< 파스텍 제품의 부하에 따른 전류 제어 기능 > 다음 그림은 모터의 부하 상태에 따른 전류의 상태를 비교해 보여줍니다. * Test 제품 : Ezi-SERVO Plus-R, 모터 사이즈 60L
 최저 부하 (무부하)일 때 전류 값이 1.6A, 최대 부하일 때 전류 값이 4A로 (60mm 모터기준)
모터의 부하 변화에 따라 자동으로 전류를 제어합니다. 따라서 모터의 발열을 억제할 수 있습니다. Test 구동조건

 <파스텍 제품의 Run 전류에 따른 모터의 온도 변화>  부하에 따른 전류 제어 부하에 따른 전류 제어 일반 정전류 제어 일반 정전류 제어 |
|
[파스텍] 08. 모터를 정지 시킬 때 진동을 최소화 할 수 있는 방법이 있나요?
|
일반적으로 스텝 모터는 관성 부하에 약하기 때문에 큰 부하가 걸리면 탈조 현상이 일어나기 쉽습니다. 1펄스에 1스텝으로 동작하지만 잘못 제어하는 경우 탈조 우려가 있기 때문에 속도를 서서히 올리고 또는 서서히 내리는 방식인 가감속 제어를 (필요 시 가감속 테이블 작성 및 사용) 사용하는 것이 탈조 및 진동을 방지할 수 있는 방법입니다. 만일 가감속 시간을 충분히 주기 어려울 경우 드라이브의 위치 게인 설정 값을 조정하여 주시기 바랍니다.
드라이브의 위치 게인 조정은 제품에 따라 Rotary Switch (Ezi-SERVO ST) 또는 파라미터 설정용 프로그램 (Ezi-SERVO Plus-E, S-SERVOII 시리즈 등)을 이용하여 조정할 수 있습니다. 설정방법은
- 설정값을 0으로 조정합니다.
- 모터의 동작이 안정화될 때까지 값을 조정합니다.
- 현재의 설정값에서 1 또는 2단계로 값을 변경하며 정밀 조정합니다.
Ezi-SERVOII Plus-E 제품은
GUI 상의 파라미터 리스트에서 파라미터 항목 22번 Position Loop Gain을 조절하시어 Gain 설정을 하실 수 있습니다. ** 설정 변경한 Gain값은 반드시 [ROM 저장하기]을 Click 하셔야 해당 제품에 완전히 변경 값이 저장 됩니다.
<출처 : Fastech>
|