모션 정밀제어 전문 기업인 파스텍의 공식 대리점 앱솔루텍 입니다.
서보형 스테핑 모터의 선두주자인 파스텍에서 서보형 스테핑모터인 Ezi-Servo 이더켓(EtherCAT) 타입 일체형 제품을 새로이 출시 하였습니다.
파스텍 이더켓 제품(Ezi-Servo제품군, I/O 모듈 등)은 국내 유통되는 거의 모든 EtherCAT Master 와 호환이 검증되었습니다.
이렇게 다양한 마스터와의 호환되는 제품은 국내 유일합니다.
자세한 내용은 아래의 첨부파일을 참조하시고,문의 사항이 있으시면 언제든지 연락 주시기 바랍니다.인천영업소 : 032-719-4966~9서울영업소 : 02-6396-4316FAX : 0504-984-4316solu@abtech.co.kr / absolutech@naver.com
 * 이더켓 ALL 은 일본 오사카 엑스포2025(KANSAI PAVILION) 전시물로 채택된 제품입니다. 현재와 미래 산업에서의 필요, 글로벌 경쟁력을 다시 한 번 입증받았습니다.
* Ezi-SERVO EtherCAT-ALL(이더켓 일체형) 450개 적용
* 키네틱 라이트 비전 (KLV : Kinetic Light Vision)
: 극세 와이어로 구체를 매달아 반투명 아크릴 구체에 특수한 조명을 투광. 독자적인 공간 표현 시스템
Ezi-SERVOⅡ EtherCAT ALL
• Motor + Encoder + Drive
• CiA 402 Drive Profile Support
• Closed Loop System
• No Gain Tuning
• No Hunting
• Heat Reduction
• Torque Improvement
1. EtherCAT Based Motion ControlEzi-SERVOⅡ EtherCAT ALL은 고속 이더넷 (100Mbps, Full Duplex) 기반 Fieldbus인 EtherCAT을 지원하는 스텝핑 모터 제어 시스템입니다.
Ezi-SERVOⅡ EtherCAT ALL은 CAN Application layer over EtherCAT(CoE)를 지원하는 EtherCAT Slave 모듈입니다. CiA 402 Drive Profile을 지원하며, Profile Position Mode, Homing Mode, Cyclic Synchronous Position Mode를 지원합니다.
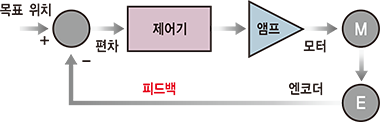
- 2. Closed Loop System
- Ezi-SERVOⅡ는 폐루프 제어 시스템입니다. 모터에 장착된 고정도 엔코더에 의해 항상 현재 위치를 파악하고 있기 때문에 탈조가 발생하지 않는 서보 시스템입니다. 엔코더 피드백에 의해 Ezi-SERVOⅡ는 항상 현재 위치를 파악하여 필요한 경우 위치 보정을 합니다. (50 μsec)
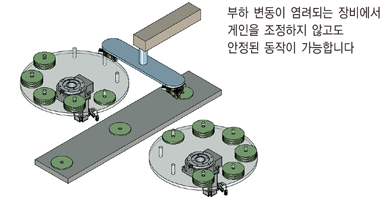
- 3. No Gain Tuning
- 일반적인 서보 시스템에서 Gain 조정은 성능 향상을 위해 필수적입니다. Gain 조정을 위해서는 많은 시간이 필요하고, 부하의 종류에 따라 문제가 발생됩니다. 그러나 Ezi-SERVOⅡ는 스텝핑 모터의 특성을 이용하여 Gain 조정이 필요치 않은 서보 시스템입니다. 특히 일반적인 서보 시스템에서 문제가 되는 저강성의 부하(예, Belt and Pulley System)에 최적인 시스템입니다. Ezi-SERVOⅡ는 저강성부하(Belt and Pulley)에서도 최적의 성능을 발휘합니다.
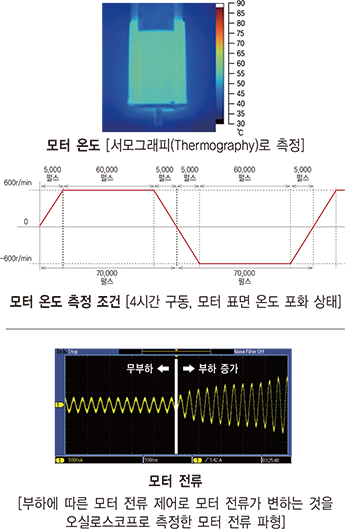
- 4. Heat Reduction / Energy Saving(부하에 따른 전류 제어)
- Ezi-SERVOⅡ는 부하에 따라 모터 전류를 자동으로 제어합니다. 따라서 모터와 드라이브의 발열을 최소화하였으며, 이에 따라 에너지가 절감됩니다.
- 5. Torque Improvement(모터 전류 설정)
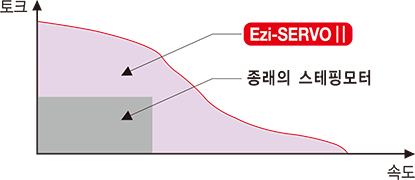
- Ezi-SERVOⅡ는 Run 전류를 150%까지 설정할 수 있으며, 그에 따라 저속 구간에서의 가감속 특성과 토크 특성이 증가합니다.
Ezi-SERVOⅡ는 저속 구간에서 토크가 30% 정도 향상이 가능합니다.  - ※ 저속에서의 토크는 약 30% 향상
측정조건 : 드라이브 = Ezi-SERVOⅡ-EC-ALL-42L - 6. No Hunting
- Ezi-SERVOⅡ는 스텝핑 모터의 특성을 이용하기 때문에 일반적인 서보 시스템에서 발생하는 헌팅 문제가 없습니다. 따라서 모터가 정지 후 완전 정지하기 때문에 미세 진동이 발생하지 않습니다. 비전 등을 이용한 고속 검사 장비 등에서 Ezi-SERVOⅡ는 정지 후 진동이 발생하지 않기 때문에 위력을 발휘합니다.
Ezi-SERVOⅡ는 정지 후 진동이 발생하지 않습니다. 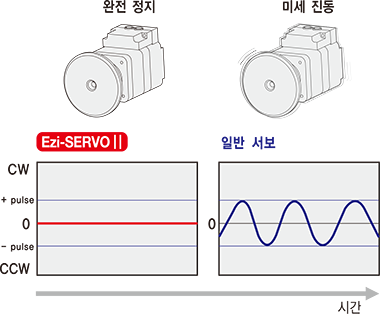
- 7. Smooth and Accurate
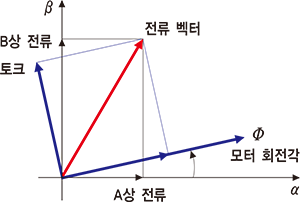
- Ezi-SERVOⅡ는 고정도 엔코더로 최대 10,000 펄스/회전이 가능한 고정도 서보 시스템입니다. 또한 기존의 마이크로 스텝 구동과 달리 고성능 MCU에 의한 벡터 제어 및 필터링 기법으로 저속에서도 리플없는 부드러운 회전이 가능합니다.
- 8. Fast Response
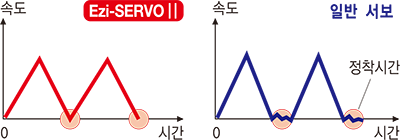
- Ezi-SERVOⅡ는 스텝핑 모터의 장점인 지령 위치에 매우 큰 추종성을 이용하기 때문에 위치 결정시간이 매우 짧습니다. 따라서 단핏치 운동이 빈번한 경우, 위치 결정시간을 대폭 단축할 수 있습니다. 일반적인 서보 시스템에서 지령위치와 응답위치 사이에는 지연이 발생하고 지령위치의 종료 후 응답위치에 도달하기 위해서는 시간이 필요하므로 위치결정 시간이 증가합니다. (Settling Time) Ezi-SERVOⅡ는 스텝핑 모터의 장점을 이용하므로 응답 지연 없이 고속의 위치 결정이 가능합니다.
- 9. High Resolution
- Ezi-SERVOⅡ는 사용 용도에 따라 다양하게 위치 지령 단위의 세분화가 가능합니다.
(최대 10,000 펄스/회전) 
- 10. High Torque
- Ezi-SERVOⅡ는 저속영역에서 일반적인 서보 모터에 비해 큰 토크를 연속하여 운전 가능합니다. 또한 Ezi-SERVO는 탈조 없이 100% 부하에서도 연속운전이 가능하기 때문에 기존의 스텝핑 모터와 같이 토크 마진을 생각할 필요가 없습니다. 회전 속도에 따라 전류의 최적 위상제어 기능의 탑재로 고속 영역에서 고토크의 운전이 가능합니다.
- 11. High Speed
- Ezi-SERVOⅡ는 고속 영역에서도 탈조 없이 운전이 가능합니다. 엔코더 피드백에 의해 현재 위치를 감시하여 100% 부하에 대해 고토크를 발생하기 때문에 고속 영역에서도 탈조 없이 운전이 가능합니다.
Open-Loop 제어 스텝핑 모터 시스템과 다른점
1. 탈조에 의한 위치 오차 없이 확실한 위치 결정이 가능합니다.
2. 정지 시에는 안정된 유지력을 갖고 있고, 기계 진동 등의 외력에 의해 위치 오차가 생겨도 자동적으로
목표치 위치로 복귀합니다.
3. Open-Loop 제어 스텝핑 모터의 경우 탈조를 고려하여 모터 토크의 약 50% 정도 밖에 사용하지
못하지만 Ezi-SERVO는 100% 사용이 가능합니다.
4. Open-Loop 스텝핑 모터는 부하의 변동에 관계없이 모든 동작 속도에서 정전류 구동을 하지만
Ezi-SERVO는 부하에 따라 전류를 제어하기 때문에 고속 운전이 가능합니다. (최고 속도: 3,000 [rpm])
서보 모터 제어 시스템과 다른점
1. 게인 조정이 필요하지 않습니다. (부하에 따라 게인을 자동 조정)
2. 정지 후 미세 진동 없이 안정된 목표 위치를 유지합니다.
3. 독자적인 제어 알고리즘에 의해 빠른 위치 결정이 가능합니다. (고속, 단핏치 운동에 적합)
4. 고속·단핏치 운동인 경우, Settling Time이 작기 때문에 비전을 이용한 검사 장비 등에 우수한 성능을 발휘합니다.
드라이브 사양
| 드라이브 형식 |
Ezi-SERVOII-EC-ALL-42 series |
Ezi-SERVOII-EC-ALL-56 series |
Ezi-SERVOII-EC-ALL-60 series |
Ezi-SERVOII-EC-ALL-86 series |
| 입력 전압 |
24VDC ±10% |
40~70 VDC |
| 제어 방식 |
32bit ARM에 의한 Closed Loop 제어 |
| 소비 전류 |
최대 500mA (모터전류 제외) |
| 환경 |
온도 |
· 사용: 0~50˚C
· 보관: -20~70˚C |
| 습도 |
· 사용: 35~85% RH (Non-Condensing)
· 보관: 10~90% RH (Non-Condensing) |
| 내진동 |
0.5g |
| 기능 |
회전 속도 |
0 ~ 3,000 [rpm] |
| 분해능 [ppr] |
10,000/회전 엔코더 사용 모델: 500 1,000 1 ,600 2,000 3,600 5,000 6,400 7,200 10,000 (분해능은 파라미터에 의해 설정) |
| 보호 기능 |
과전류 이상, 과속도 이상, 위치 추종 이상, 과부하 이상, 과열 이상, 회생 전압 이상, 모터 접속 이상, 엔코더 접속 이상, 인포지션 이상, ROM 이상, 위치 오차 초과 이상 |
| EtherCAT |
지원 프로토콜 |
CoE (CiA402 Drive Profile), FoE (Firmware Download) |
| 지원 방식 |
Profile Position Mode, Homing Mode, Cyclic Synchronous Position Mode |
| 동기화 |
Free Run, SM Event, DC SYNC Event |
| I/O Signal |
입력 신호 기능 |
3개의 고정 입력 (LIMIT+, LIMIT-, ORIGIN), 3개의 범용 입력 (포토커플러 입력) |
| 출력 신호 기능 |
2개의 범용 출력 (포토커플러 출력), Brake 신호 |
시스템 구성도
Ezi-SERVO EtherCAT ALL [M Type]
Ezi-SERVO EtherCAT ALL [R Type]

외부 배선도
Ezi-SERVO EtherCAT ALL [M Type]

[주의사항] 모터용 중계케이블 연결 시에는 반드시 사용자 매뉴얼을 참조하시기 바랍니다. 제품 손상의 우려가 있으므로 꼭 주의하시기 바랍니다.
※ 드라이브와 상위 제어기 사이의 I/O 케이블을 연결할 때에는 상위 제어기의 전원과 드라이브의전 원은 모두 차단한 상태에서 실시하시기 바랍니다. 그렇지 않으면 드라이브가 손상될 우려가 있습니다. Ezi-SERVO EtherCAT ALL [R Type]

[주의사항] 모터용 중계케이블 연결 시에는 반드시 사용자 매뉴얼을 참조하시기 바랍니다. 제품 손상의 우려가 있으므로 꼭 주의하시기 바랍니다.
※ 드라이브와 상위 제어기 사이의 I/O 케이블을 연결할 때에는 상위 제어기의 전원과 드라이브의 전원은 모두 차단한 상태에서 실시하시기 바랍니다. 그렇지 않으면 드라이브가 손상될 우려가 있습니다.
1. EtherCAT 상태 표시 LEDEtherCAT의 통신 상태를 알려주는 LED입니다.
| 표시 |
색상 |
상태 |
설명 |
| RUN |
Green |
OFF |
INIT 상태 또는 전원 OFF |
| Blinking |
PRE-OPERATIONAL 상태 |
| Single Flash |
SAFE-OPERATIONAL 상태 |
| ON |
OPERATIONAL 상태 |
| Flickering |
BOOTSTRAP 상태 |
| Error |
Red |
OFF |
No Error or Power OFF |
| Blinking |
Error가 없는 상태 또는 전원 OFF |
| Single Flash |
Local Error |
| Double Flash |
Watchdog Time Out |
Link /
Activity |
Green |
OFF |
Link 비활성화 |
| ON |
Link 활성화 |
| Flickering |
Link 활성화 및 동작 중 |
1. 상태 표시 LED
| 상태 |
LED |
| Disable |
Green :
Red : |
녹색 점멸,
적색 소등 |
| Enable |
Green :
Red : |
녹색 점등,
적색 소등 |
| 운전 중 |
Green :
Red : |
녹색과
적색 점등 |
| In-position 이탈 |
Green :
Red : |
녹색과 적색이
교대로 점멸 |
| 알람 |
Green :
Red : |
알람 번호 만큼
적색 점멸 반복 | 
|